












Treppensteiger / Stair Climbing Robot
Staubsaugroboter für private Haushalte sind meist flach gebaut, um unter Möbeln saugen
zu können. Treppenstufen sind viel höher und stellen für diese Geräte ein unüberwindliches
Hindernis dar. Viele Wohnungen und Häuser haben aber mehrere Stockwerke. Die bisher
erhältlichen Staubsaugerroboter sind dafür nur bedingt geeignet. Entweder muss ein
solches Gerät von Hand in das andere Stockwerk getragen werden oder es werden mehrere
Geräte benötigt. Auch bleibt die Treppe selbst ungereinigt.
Um dennoch sowohl diese Treppenstufen saugen zu können, als auch höher oder tiefer liegende Stockwerke zu erreichen, ist eine Vorrichtung erforderlich, welche diese Geräte hochheben oder absenken kann. Dennoch soll die Größe und vor allem die Höhe des Gerätes nicht deutlich zunehmen. Die Vorrichtung soll aus möglichst wenigen Komponenten hergestellt sein und möglichst wenig aktive Bauteile aufweisen.
Funktionsweise
Die hier beschriebene Erfindung geht davon aus dass, sich ein Saugroboter frei im Raum am Boden bewegen und positionieren kann. Es geht also nur darum das Geräte um eine Stufe anzuheben. Eine Art zweibeiniges Laufen ist nicht erforderlich, auch nicht eine schnelle kontinuierliche Bewegung über mehrere Stufen hinweg.
Vorgeschlagen wird, das Grundgerät um einen Hubrahmen zu ergänzen. Dieser ist mittels zweier Hebel am Grundgerät befestigt. Über eine mechanische Zwangsführung wird bei der Drehbewegung Hubrahmen und Grundgerät immer parallel gehalten. Für den Bewegungsablauf ist nur ein Antriebsmotor erforderlich.
Die folgende Bildsequenz zeigt den Anfang des Bewegungsablaufs:
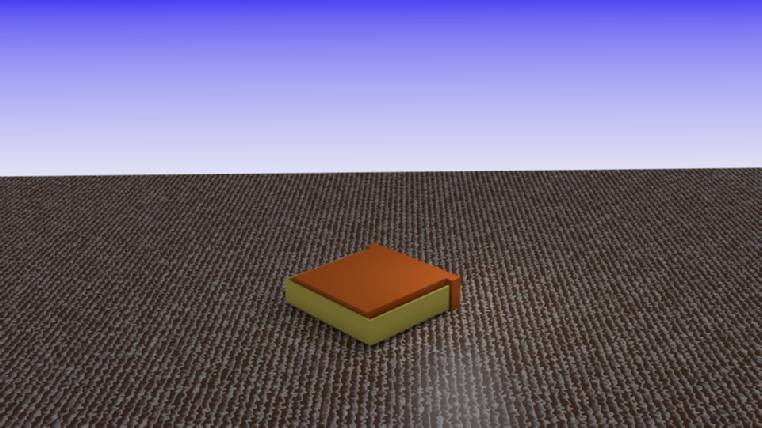
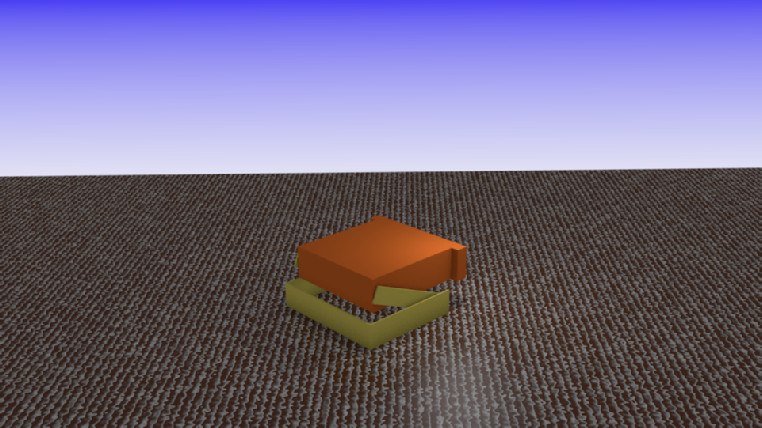
Dargestellt in Orange sei das Grundgerät, also ein typischer Saugroboter und in Gelb die Ergänzung des hier vorgestellten Mechanismus. Man erkennt dass durch den Hebel zwischen Grundgerät und dem am Boden aufsetzenden Hubrahmen das Grundgerät nach oben und vorne bewegt wird.
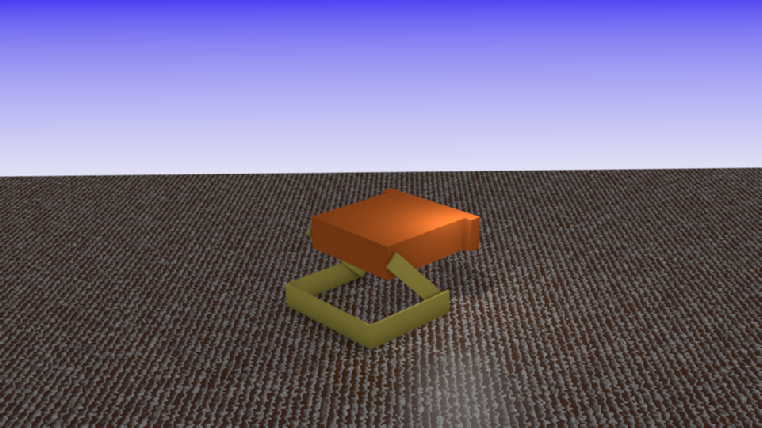
Befindet sich vor dem Gerät eine Treppenstufe, setzt das Grundgerät dort auf. Im weiteren Bewegungsablauf wird der Hubrahmen durch die fortlaufende Rotation des Hebelarms nachgezogen und in seine Ausgangsposition zurückgeführt.
Das folgende Video zeigt den kompletten Bewegungsablauf:
Vorteilhaft ist:
- nur ein zusätzlicher Motor erforderlich
- Grundgerät unterscheidet sich kaum von bisherigen Formen
- Vorderseite und Unterseite bleiben unverändert
- gesamte Mechanik verschwindet in der Kontur des Gerätes
Das Verfahren ist durch ein Patent geschützt. Sollten Sie Interesse an einer Lizenz haben, wenden sie sich an uns.